MOVIMENTAZIONE
CONCEPT SCARTATI

|
|
Azionamento Con Cinghie
La seconda soluzione prevedeva il posizionamento del motore a ridosso della coscia e l'utilizzo di un sistema di pulegge e cinghie per moltiplicare la coppia motrice. I problemi principali sono legati al fatto che la coppia richiesta portava al dimensionamento di cinghie di larghezza eccessiva, e oltretutto un motore posizionato a livello della coscia non consente una comoda gestione degli spazi
|

|
LA NOSTRA SOLUZIONE
Accoppiamento con riduttore epicicloidale
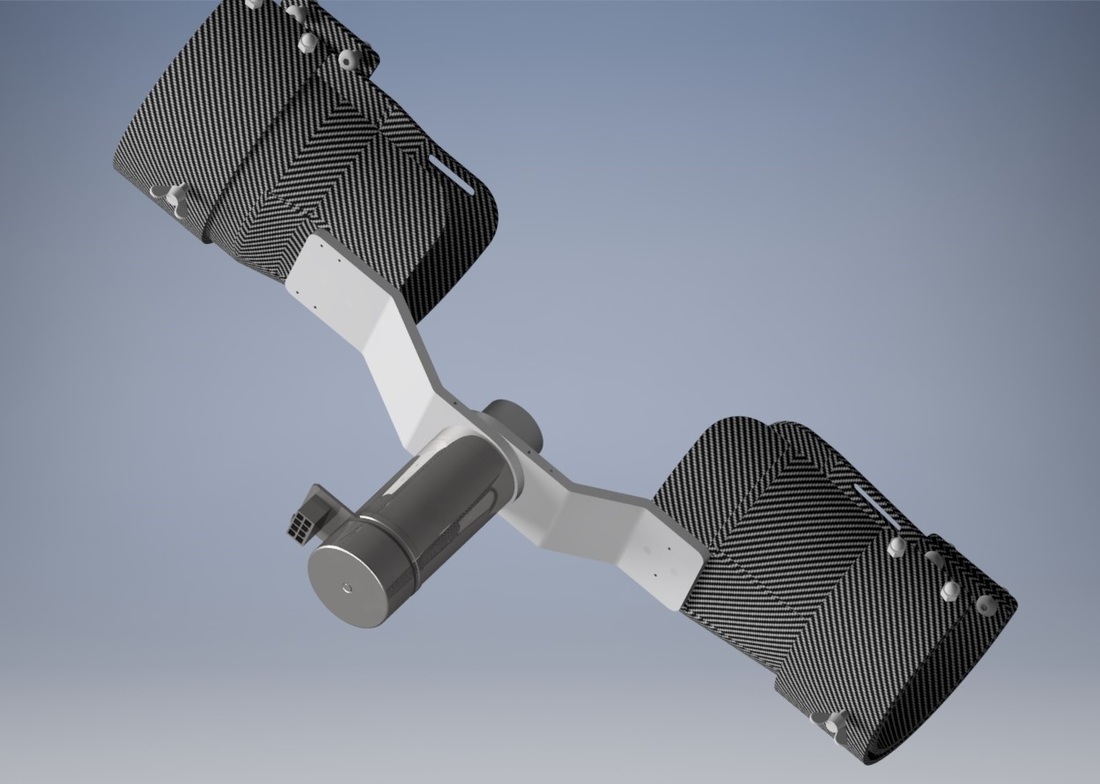
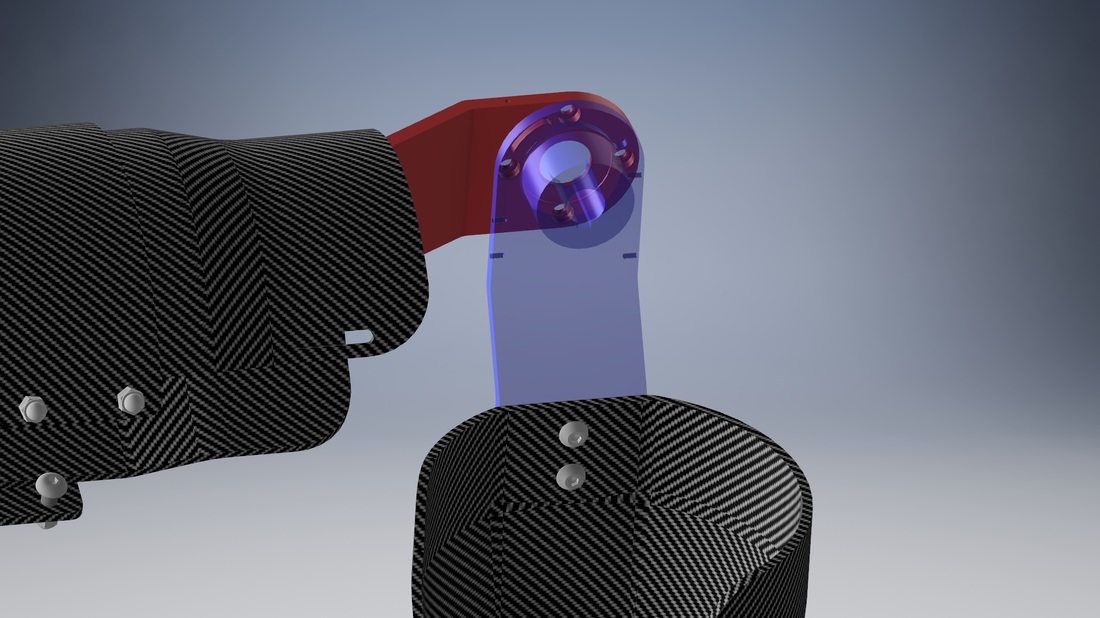
Gruppo Attuatore
|

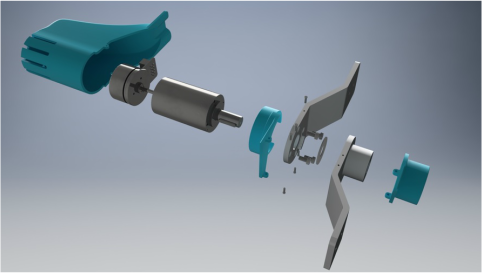
Gruppo Attuatore - Esploso
|
La soluzione che abbiamo deciso di adottare sfrutta un motore elettrico della linea Flat della casa Maxon Motor, prodotti specificamente per esigenze spaziali particolarmente contenute, situato sul ginocchio e accoppiato con un riduttore epicicloidale. L'albero del riduttore lavora dunque in presa diretta mediante una linguetta, trasmettendo il moto direttamente alla piastra collegata al guscio della gamba. Il dimensionamento è stato effettuato a partire dalla coppia stimata generata dal peso dell'arto, ovvero gamba e piede, e dei componenti dell'esoscheletro stesso. Stimata una coppia di 12 Nm si è proceduto al dimensionamento del riduttore e del motore, in ambito di numero di giri e coppia trasmessa.
Questa soluzione è stata preferita alle altre in quanto portava diversi vantaggi dal punto di vista produttivo, la Maxon Motor fornisce infatti l'accoppiamento motore-riduttore preassemblato e dotato di linguetta, e dal punto di vista dinamico, fornendo la coppia richiesta con un sistema semplice e preciso, al costo di penalizzare l'aspetto visivo e incrementando gli ingombri, ma sempre in modo gestibile e in una zona, quella del ginocchio, in cui non arreca fastidi anche se utilizzato seduti su una carrozzina.
Questa soluzione è stata preferita alle altre in quanto portava diversi vantaggi dal punto di vista produttivo, la Maxon Motor fornisce infatti l'accoppiamento motore-riduttore preassemblato e dotato di linguetta, e dal punto di vista dinamico, fornendo la coppia richiesta con un sistema semplice e preciso, al costo di penalizzare l'aspetto visivo e incrementando gli ingombri, ma sempre in modo gestibile e in una zona, quella del ginocchio, in cui non arreca fastidi anche se utilizzato seduti su una carrozzina.
|
La scelta è dunque ricaduta sulle coppie EC45flat da 70 W (402658) con riduttore GP42C a 3 stadi (260553) per il ginocchio, mentre per la caviglia si è optato per un EC20flat da 3W (351101) e un riduttore GP22C (144005), riproponendo una struttura analoga, semplicemente in scala ridotta. Questi accoppiamenti forniscono in realtà una coppia massima di 15 Nm, fornendo così un coefficiente di sicurezza adeguato nel caso sia richiesta maggiore potenza
|
|
Abbiamo provveduto ad inserire anche un blocco di sicurezza meccanico che impedisca al motore di far procedere la gamba oltre una certa ampiezza angolare in caso di malfunzionamento del sistema di controllo, che verrà regolato da un sistema Arduino collegato ad una application per smartphone
|
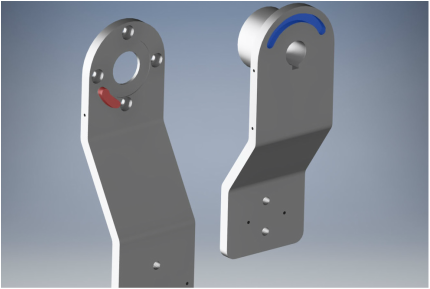
Blocco Meccanico - Parte Maschio e Femmina
|
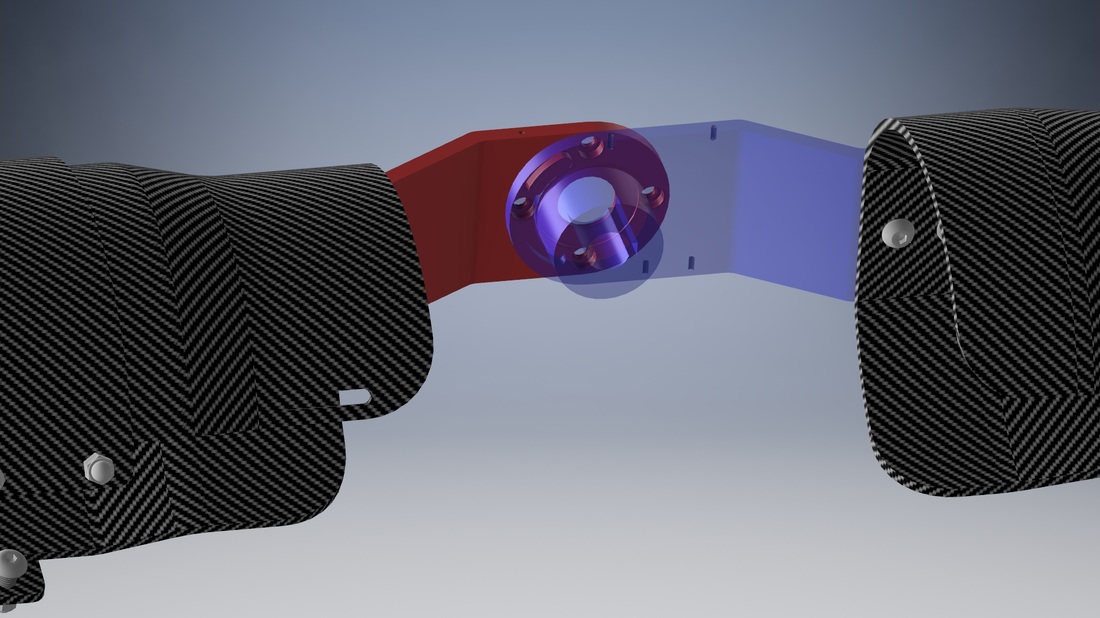
Posizione Distesa
|
Posizione Flessa
|

